
Análisis detallado del Servomotor
Estimados lectores, soy Flavio, y en esta ocasión, exploraremos con detalle la ingeniería y la funcionalidad de un dispositivo electromecánico fundamental en la industria moderna: el servomotor. Este sistema es una amalgama de componentes eléctricos y mecánicos diseñada para controlar con alta precisión la posición de su eje en un momento dado. Conocidos en el ámbito técnico también como servos, estos dispositivos se caracterizan por su capacidad de girar determinados grados y mantenerse estables en una posición predeterminada, actuando como motores especializados con control de posición integrado.
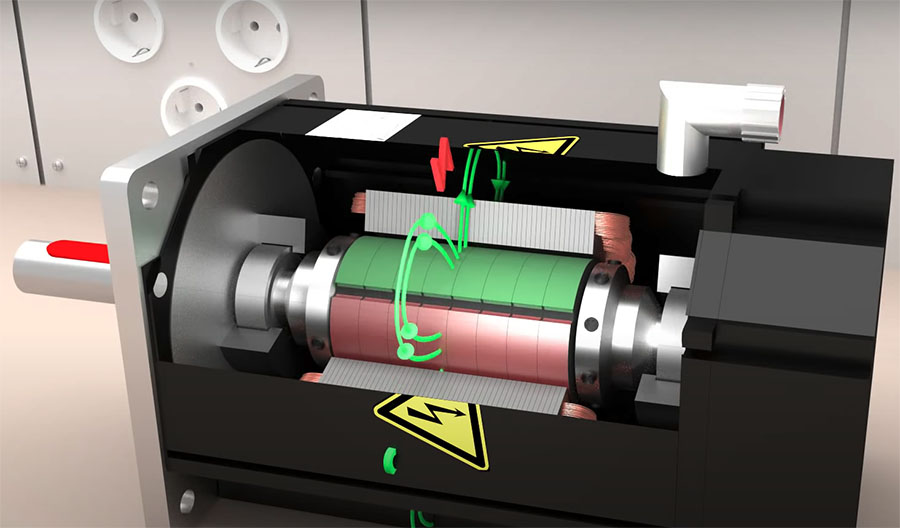
Composición y Estructura del Servomotor
El servo se constituye por un motor eléctrico de corriente continua (DC), una serie de engranajes reductores y una tarjeta de control, todo ensamblado dentro de una carcasa que, dependiendo del modelo, puede ser de plástico o metal. La función de los engranajes es incrementar el torque y permitir que el servo mantenga su posición. El circuito eléctrico incorporado tiene la tarea de regular tanto el movimiento como la posición exacta del eje motor.
Propósito del Servomotor
El servomotor se distingue por su habilidad para ser controlado precisamente en cuanto a su posición se refiere, con un rango de movimiento que comúnmente alcanza los 180º y puede ser modificado para rotaciones completas de 360º. Su utilización es amplia, encontrándose en sistemas de automatización, modelismo, especialmente vehículos controlados por radio (RC), y en el ámbito de la robótica debido a su capacidad para el posicionamiento exacto.
Funcionamiento del Servomotor
El principio operativo del servomotor se basa en la modulación por ancho de pulso (PWM). Estos dispositivos cuentan con tres hilos, dos para la alimentación eléctrica y un tercero destinado a recibir los pulsos de control. A través de una señal con una frecuencia estándar de 50 Hz, se determina la posición angular del servomotor ajustando la duración de los pulsos. El circuito de control compara la señal de referencia con el voltaje real, activando un puente H para ajustar la dirección del rotor hasta alcanzar la posición deseada.
Componentes Clave de un Servomotor
- Motor DC: Proporciona el movimiento al sistema.
- Engranajes Reductores: Encargados de moderar la velocidad del motor y aumentar su torque.
- Sensor de Posición: Generalmente un potenciómetro acoplado al eje, determina la posición angular.
- Circuito de Control: Una placa electrónica que gestiona el posicionamiento mediante la comparación y ajuste de la señal de referencia.
Variaciones de Servomotores
Existen principalmente dos categorías de servomotores: digitales y analógicos. Ambos comparten una estructura similar pero los digitales incorporan un microprocesador que gestiona la señal de entrada y controla el motor a una frecuencia superior a los analógicos. Dentro de los servomotores de corriente continua, encontramos variantes con y sin escobillas, siendo estas últimas de tecnología más avanzada.
Otras Clasificaciones de los Servomotores
Además de la clasificación primaria, los servomotores se diferencian según su construcción y funcionalidad:
- Tipología: Basada en el tipo de señal de control (analógica o digital).
- Parámetros: Como el torque, la velocidad y la dimensión del servo.
- Aplicaciones Específicas: Para tareas de alta precisión como en la robótica o áreas menos exigentes como juguetes y hobbies.
el servomotor es una herramienta versátil que se ha integrado como componente esencial en diversos campos de la tecnología moderna. Su capacidad para posicionar con precisión y su adaptabilidad a diferentes necesidades lo convierten en un elemento indispensable en proyectos de ingeniería, automatización y diseño.